
I am a third-year Ph.D. candidate in School of Geodesy and Geomatics at Wuhan University. I am very lucky to be supervised by Prof. Jiancheng Li at Wuhan University. My research interests lie in 3D computer vision, Simultaneous Localization and Mapping (SLAM), Global Navigation Satellite System (GNSS) localization. I was a research intern at JingDong (JD.com, Inc). I got my Bechelor’s Degree from China University of Geosciences Beijing in 2018, and Master’s Degree from Wuhan University supervised by Prof. Jiancheng Li in 2021.
News
🚀 [12.2024] Reached 100+ citations milestone on Google Scholar
🚀 [07.2024] One paper URS-NeRF is accepted at ECCV 2024
😎 [10.2023] Joined CVRP Lab of NUS as a visiting student supervised by Gim Hee Lee!
🚀 [06.2023] One paper DRT-VIO is CVPR 2023!
🚀 [06.2022] One paper EDM Method is accepted at GPS Solutions!
🚀 [01.2022] One paper PLS-VIO is accepted at ICRA 2022 & RAL!
Featured Works
PVI-DSO: Leveraging Planar Regularities for Direct Sparse Visual-Inertial Odometry
Bo Xu, Xin Li, Jingrong Wang, Chau Yue, Jiancheng Li,
IEEE Sensors Journal
[Code] [PDF]
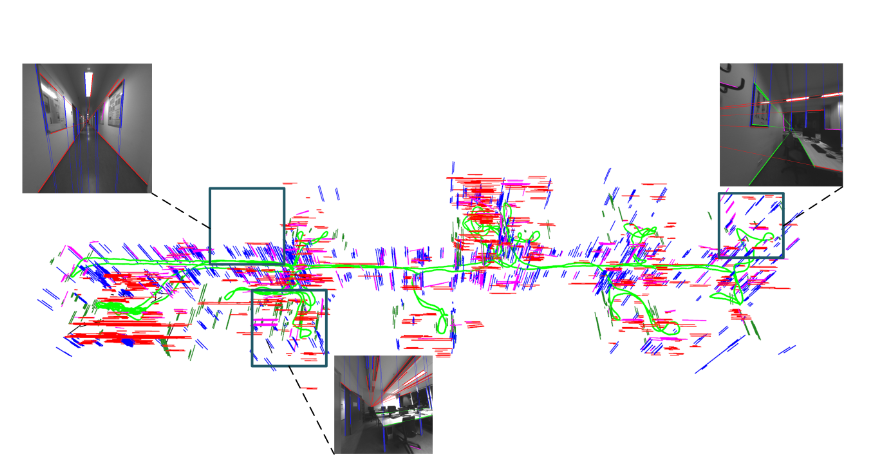
Leveraging Structural Information to Improve Point Line Visual-Inertial Odometry
Bo Xu, Peng Wang, Yijia He, Yu Chen, Yongnan Chen, Ming Zhou,
ICRA 2022 & RAL
[Code] [PDF]
Other Publications / Preprints
Li Yan, Yinghao Zhao, Jicheng Dai, Bo Xu, Hong Xie, Yuquan Zhou Intelligent perception measurement technology of autonomous UAV for unknown environment . Acta Geodaetica et Cartographica Sinica (测绘学报).
Yu Chen, Bo Xu, Bin Wang, Jiaming Na, Pei Yang GNSS Reconstrainted Visual–Inertial Odometry System Using Factor Graphs. IEEE Geoscience and Remote Sensing Letters.
Jingrong Wang, Jingnan Liu, Shoujian Zhang, Bo Xu, Yarong Luo and Ronghe Jin Sky-view images aided NLOS detection and suppression for tightly coupled GNSS/INS system in urban canyon areas. Measurement Science and Technology.
Bo Xu, Shoujian Zhang, Jingrong Wang, Jiancheng Li An innovation-based cycle-slip, multipath estimation, detection and mitigation method for tightly coupled GNSS/INS/Vision navigation in urban areas. ArXiv.
Jingrong Wang, Bo Xu, Ronghe Jin, Shoujian Zhang, Kefu Gao, Jingnan Liu Sky-GVIO: an enhanced GNSS/INS/Vision navigation with FCN-based sky-segmentation in urban canyon. ArXiv.
Zewen Xu, Yijia He, Hao Wei, Bo Xu, BinJian Xie, Yihong Wu An Accurate and Real-time Relative Pose Estimation from Triple Point-line Images by Decoupling Rotation and Translation. ArXiv.